Yunxi TANG
Postdoctoral Researcher in Robotics & AI

The Chinese University of Hong Kong
Multi-Scale Medical Robotics Center
Hong Kong SAR
I am a Postdoctoral Researcher in robotics and artificial intelligence at The Chinese University of Hong Kong (CUHK), affiliated with the Multiscale Robotics Center in Hong Kong SAR. Previously, I received my Ph.D. from the Bioinspired Robotics and Medical Technology (BMT) group at CUHK, where I worked with Prof. Samuel Au.
My research focuses on enabling robots to perceive, model, and manipulate deformable objects, with a particular emphasis on autonomous surgical systems. My work lies at the intersection of:
- Learning-based control and manipulation
- Vision-based reconstruction and perception
- Safety-aware autonomous surgical systems
- Deformable Object modeling, planning, and state estimation
I am particularly interested in bridging simulation and real-world deployment through high-fidelity simulation and digital twin technologies. My long-term goal is to build safe, reliable, and intelligent autonomous surgical systems that can operate robustly in complex, real-world environments.
news
| May 01, 2026 | CUHK MSc students with a strong interest in Robotics and AI are encouraged to contact me via email to explore research opportunities in embodied surgical intelligence within the BMT group, focusing on deformable object manipulation and surgical world action model. |
|---|---|
| Apr 24, 2026 | One TMech paper, “Hierarchical Deformation Planning and Neural Tracking for DLOs in Constrained Environments,” has been accepted. |
| Oct 20, 2025 | One RAL paper, “Generative 3D State Estimation for DLOs From Partial Observations,” has been accepted. |
| Jul 22, 2025 | Successfully passed my Ph.D. defense at The Chinese University of Hong Kong. Thesis: Learning-based Deformable Linear Object Manipulation in Unstructured Environments. |
| Jul 14, 2024 | One RSS paper, “Homotopic path set planning for robot manipulation and navigation,” has been accepted. |
selected publications
-
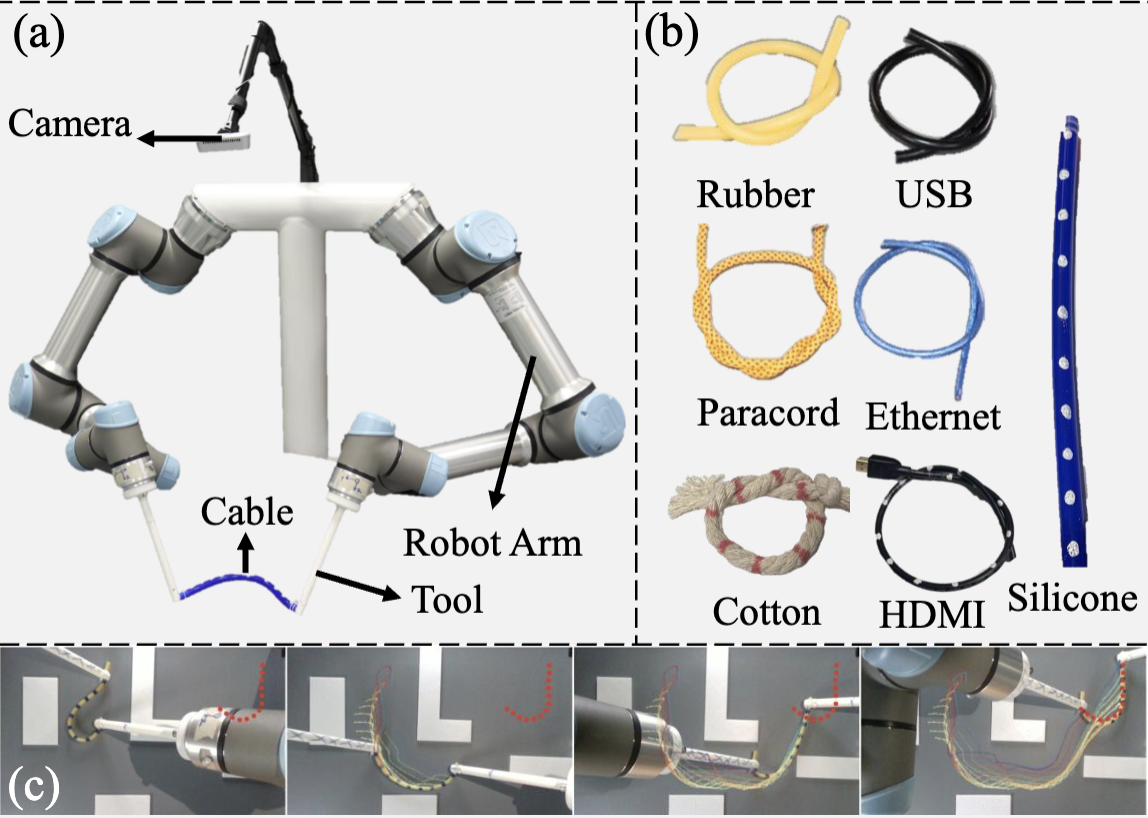 Hierarchical Deformation Planning and Neural Tracking for DLOs in Constrained EnvironmentsIEEE/ASME Transactions on Mechatronics, 2026
Hierarchical Deformation Planning and Neural Tracking for DLOs in Constrained EnvironmentsIEEE/ASME Transactions on Mechatronics, 2026 -
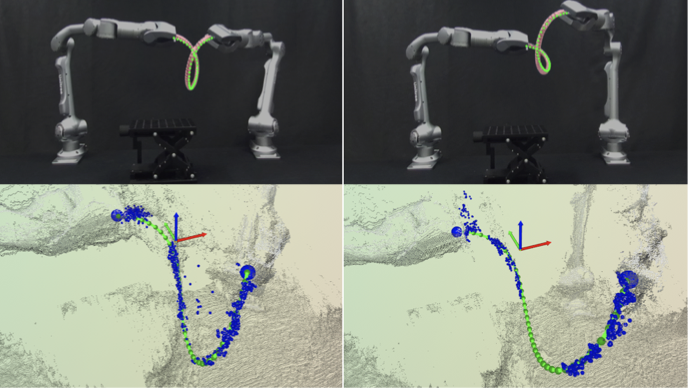 Generative 3D State Estimation for DLOs From Partial ObservationsIEEE Robotics and Automation Letters, 2025
Generative 3D State Estimation for DLOs From Partial ObservationsIEEE Robotics and Automation Letters, 2025 -
 Learning-based MPC with safety filter for constrained deformable linear object manipulationIEEE Robotics and Automation Letters, 2024
Learning-based MPC with safety filter for constrained deformable linear object manipulationIEEE Robotics and Automation Letters, 2024 -
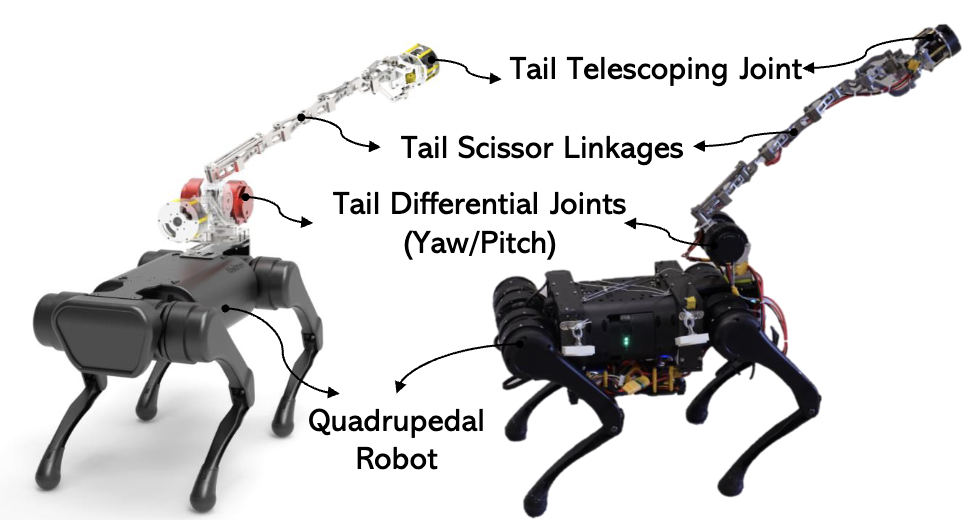 Towards safe landing of falling quadruped robots using a 3-dof morphable inertial tailIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
Towards safe landing of falling quadruped robots using a 3-dof morphable inertial tailIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023